Stirling motor


|
Stirling motor |
|
|
Datum: Februari-Mei 2017
Inleiding:
| Bij AliExpress en andere Chinese webwinkels kan men relatief goedkoop bouwpakketjes voor een Stirling motor kopen. Daar kunnen we een aantal experimenten mee uitvoeren. |
Materiaal:
|
|
 |
|
 |
|
| Voltmeter |
 |
| Lichtmeter |
|
| Laserwaterpas |
 |
| Multimeter |
 |
Uitvoering:
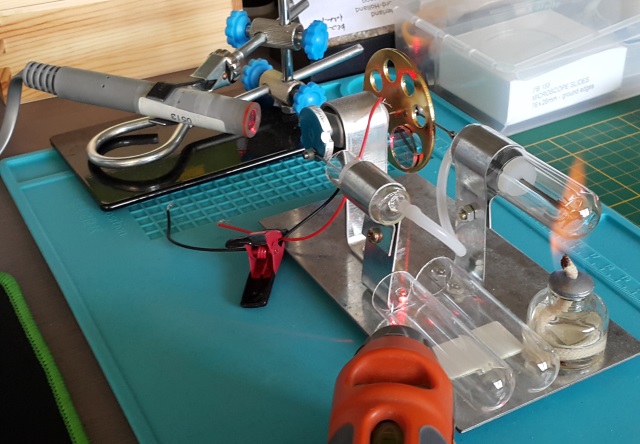
| Stirling motor |
|
| Bepalen van het geproduceerde voltage |
|
 |
| Bepalen van de rotatiesnelheid |
|
 |
Resultaten:
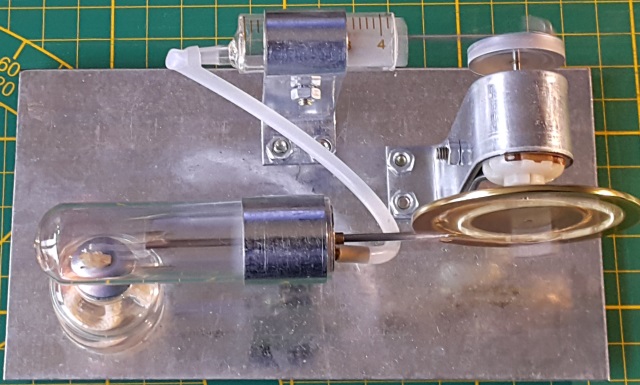
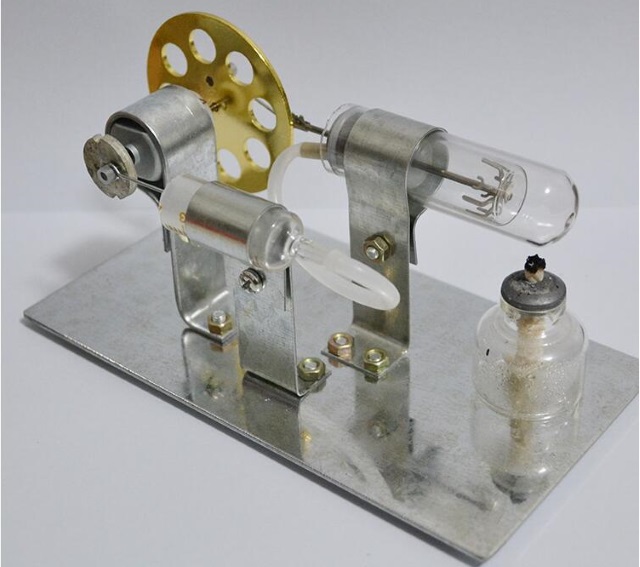
| Stirling motor | |
|
Bovenaanzicht |
|
|
|
|
|
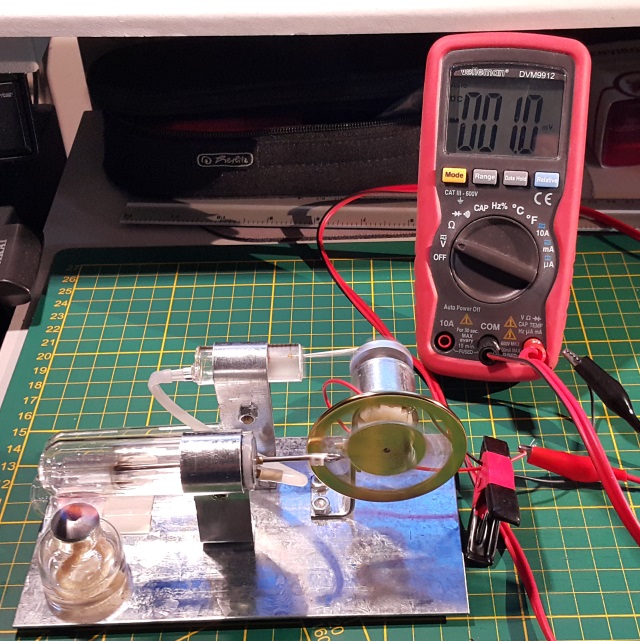
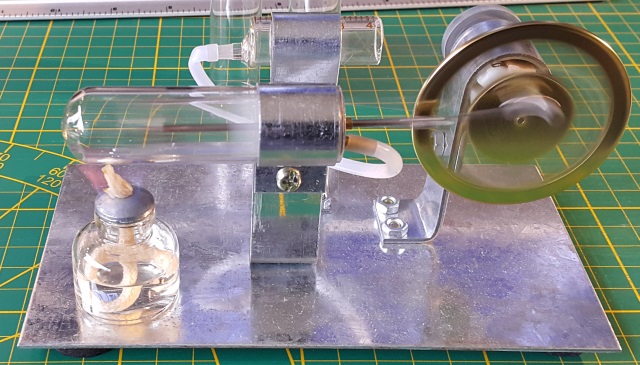
Zijaanzicht van de Stirling motor in werking |
|
 |
|
|
Filmpje van de Stirling motor in werking |
|
|
YouTube link:
Stirling motor |
|
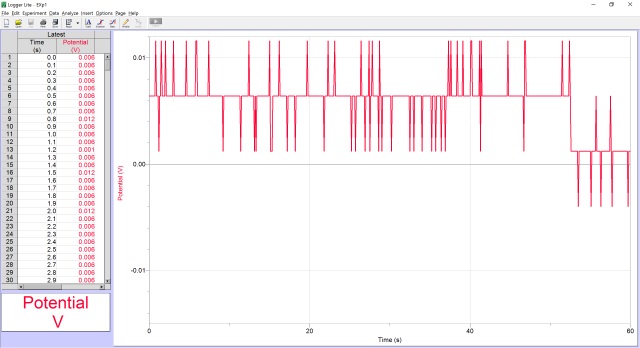
| Bepalen van het geproduceerde voltage | |
| In onderstaande afbeelding is het "ruwe"meetsignaal te zien. Om dat wat beter te verwerken kan men het als CSV of als txt file exporteren en importeren in Excel voor verdere verwerking. | |
 |
|
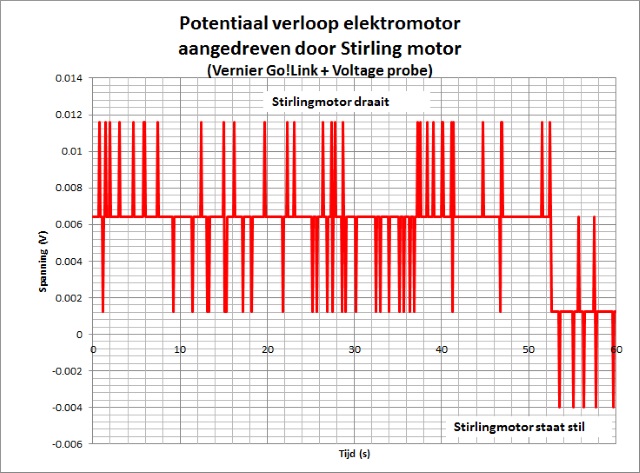
| In onderstaande figuur kan men het opgeschoonde resultaat zien met wat commentaar toegevoegd. | |
 |
|
|
De motor produceert maar ca. 6mV, verrassend
weinig. Op het einde van de meting heb ik de Stirling motor even stopgezet
om er zeker van te zijn dat ik een geproduceerd signaal aan het meten was.
Ook heb ik dit nagemeten met een multimeter (AC mode) maar die gaf hetzelfde
resultaat. In eerste instantie dacht ik dat de pieken die men in het signaal ziet misschien te gebruiken waren voor het bepalen van de rotatiesnelheid. Aangezien deze echter ook in het "0-signaal" zitten is dat niet mogelijk. |
|
| Bepalen van de rotatiesnelheid | |
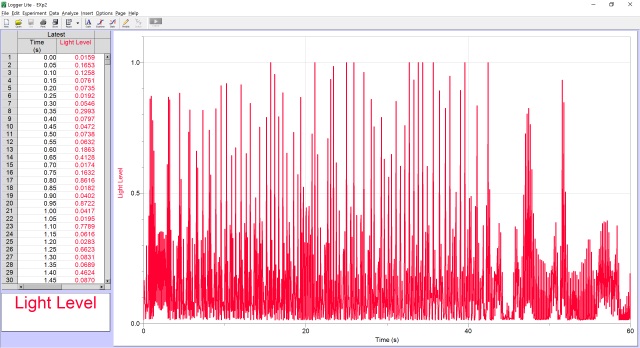
| In onderstaande afbeelding is het "ruwe"meetsignaal te zien. Om dat wat beter te verwerken kan men het als CSV of als txt file exporteren en importeren in Excel voor verdere verwerking. | |
 |
|
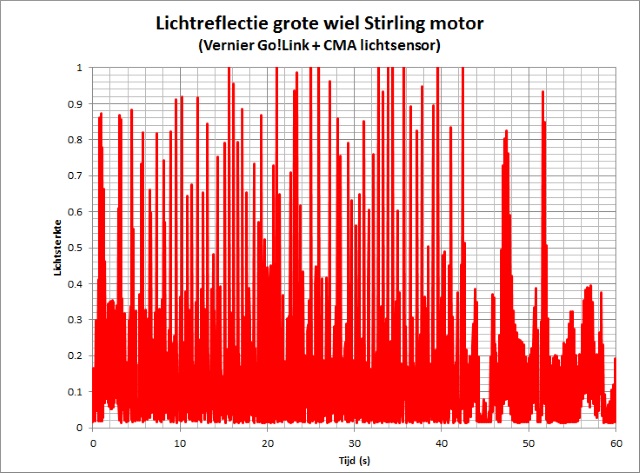
| In onderstaande figuur kan men het opgeschoonde resultaat zien. | |
 |
|
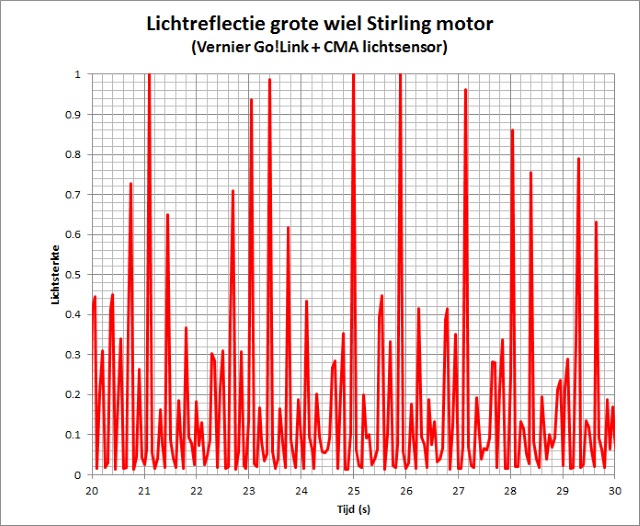
| Dit signaal is een beetje ruw. Zomen we in. | |
 |
|
| Dan tellen we ca. 54 pieken in 10 seconden oftewel een rotatiesnelheid van 5.4/s. Dit zonder rekening te houden met de hoogte van de piek. Uiteindelijk geeft dat een beetje een ongemakkelijk gevoel Kunnen we niet op een andere manier controleren of deze rotatiesnelheid klopt? Na wat nadenken kwam ik tot de conclusie dat dat inderdaad kon nl door het audiosignaal te analyseren dat tijdens het opnemen van de video opgenomen was. | |
|
YouTube link: Stirling motor |
|
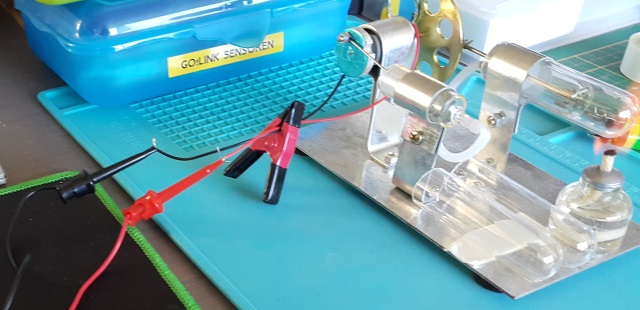
| Filmpje van de Stirling motor tijdens de bepaling van de rotatiesnelheid | |
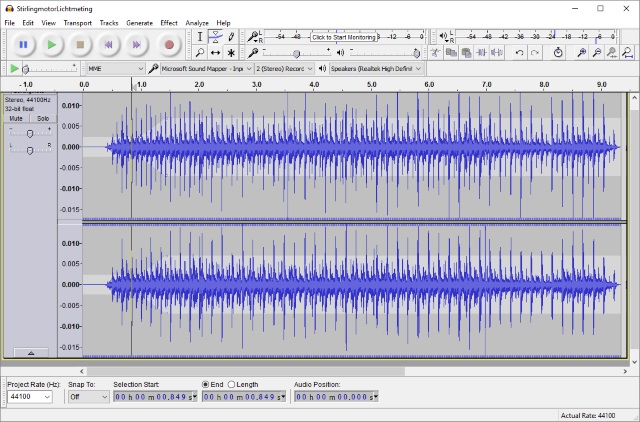
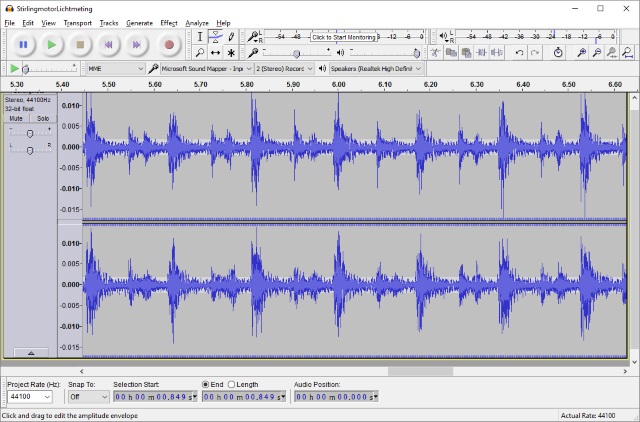
| Converteren we de MP4 file naar een MP3 file mbv van een online conversietool enl aden de file vervolgens in Audacity in dan krijgen we onderstaand resultaat. | |
 |
|
| Zomen we weer in. | |
 |
|
| We moeten bij de analyse van het signaal een beetje rekening houden met de beweging die de zuiger maakt , een heenslag en een terugslag. Dat zien we ook terug in het signaal een "harde" slag en een meer "piep" slag. Als we daar rekening mee houden dan zie we hier ook een rotatiesnelheid van ca. 5.5 rotaties/s. | |
Discussie & conclusie:
| Stirling motor |
|
Alhoewel er verschillende varianten van een Stirlingmotor zijn deze allemaal gebaseerd op het principe dat gassen (in dit geval lucht) bij verwarming uitzetten en bij afkoelen krimpen. Door op een handige manier gebruik te maken van dit verschil in volume/temperatuur kan men dit omzetten in beweging. In de grote cilinder wordt de lucht opgewarmd door de brander eronder, daardoor gaat de luchtuitzetten en de zuiger beweegt naar een situatie waarin het volume groter is (bij constante druk). De beweging van de zuiger wordt overgebracht naar het vliegwiel waarbij de beweging van het vliegwiel overgebracht wordt op de zuiger van de kleine (koude) cilinder. Deze trekt nu warme lucht uit de grote cilinder (maximaal volume) dat vervolgens afkoelt in de kleine cilinder. De lucht krimpt dan weer waardoor ook de zuigers en dus ook het vliegwiel in beweging komen totdat een minimaal volume bereikt is waarbij de koude lucht weer in de grote cilinder terecht komt en de cyclus weer opnieuw kan beginnen. |
| Al met al begon ik dit experiment met alleen maar de gedachte om de Stirling motor even te laten draaien maar vervolgens probeerde ik er wat meer uit te halen. |
| Dat is uiteindelijk met de rotatiesnelheids bepaling goed gelukt als was de eerste benadering die ik koos nogal omslachtig. Analyse van het geluidssignaal is in deze veel gemakkelijker. |
| Waar ik nog niet helemaal uit ben is het minieme voltage dat de elektromotor levert. Volgens mij zou dat normaal heel wat hoger moeten zijn. Een multimeter geeft echter hetzelfde resultaat. Ik heb er nog even over nagedacht om de elektromotor uit de opstelling te halen maar besloot daarvan af te zien omdat het in elkaar sleutelen van de Stirling motor iets meer gepriegel was dan ik oorspronkelijk verwacht had. Ik houd het er maar voorlopig op dat de kwaliteit van deze elektromotor niet zo goed is. |
Opmerkingen:
|
Literatuur:
Relevante websites: Minder relevante websites: |
Achtergrondinformatie:
|
De schotse domine Robert Stirling (1790-1878) is de uitvinder van dit soort motoren, reden waarom die naar hem zijn vernoemd. Stirlingmotoren worden tegenwoordig toegepast bij onder andere warmte-krachtkoppeling oftewel WKK. Daarnaast kunnen stirlingmotoren worden toegepast in cv-ketels om verwarming te genereren van 1,5 of 10 kW. Dit wordt ook wel micro-warmte-krachtkoppeling genoemd. Hiervoor wordt gebruik gemaakt van thermoakoestische stirlingmotoren die lineair trillend werken. In deze variant van stirlingmotoren wordt wisselstroom opgewekt die rechtstreeks aan het net kan worden geleverd. |
| Thermodynamica van de Stirling motor |
Theoretisch gezien kan men 4 fasen onderscheiden gedurende elke cyclus.
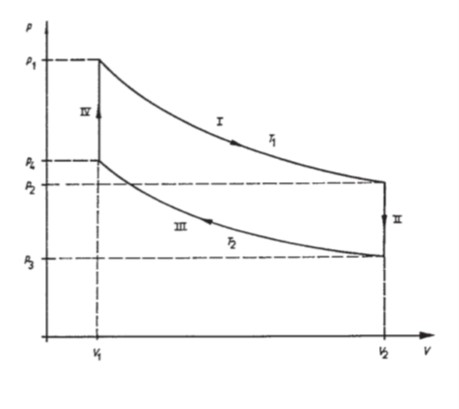 i. Een isotherme verandering als warmte wordt toegevoerd en arbeid geproduceerd wordt: ii. Een isochore verandering als het gas afkoelt:  iii. Een isotherme verandering als warmte geproduceerd wordt en arbeid toegevoegd:  iv. Een isochore verandering als warmte toegevoerd wordt aan het systeem:  Volgens de eerste wet van de thermodynamica geldt dat als thermische energie wordt toegevoegd aan een geïsoleerd system de hoeveelheid even groot is als de som van de inwendige energie toename en de mechanische arbeid die verricht wordt: Voor de Stirling motor is het van beland dat the thermische energie die geproduceerd wordt in de isochore stap opgeslagen kan worden en later weer gebruikt kan worden tijdens de isoschore opwarmingsstap (regeneratie principe) . Dientengevolge wordt, gedurende fase IV de hoeveelheid thermische energie vrijgegeven tijdens fase II, regeneratief geabsorbeerd. Dit betekent dat er alleen maar een uitwisseling van thermische energie plaatsvindt binnen de motor. Mechanische arbeid wordt toegevoegd tijdens fase I en III. Aangezien de inwendige energie niet veranderd gedurende isotherme processen zal de arbeid die uitgevoerd wordt in deze fases gelijk zijn aan de hoeveelheid geabsorbeerde of vrijgegeven thermische energie. Aangezien  Waarin n het aantal mol opgeslagen in het systeem is en R de gas constant geldt voor de hoeveelheid arbeid geproduceerd tijdens fase I:  Dientengevolge is de hoeveelheid arbeid toegevoegd tijdens fase III:  aangezien  De totale hoeveelheid arbeid is dan de som van W1 en W3, hetgeen gelijk is aan het oppervlakte in het pV diagram: 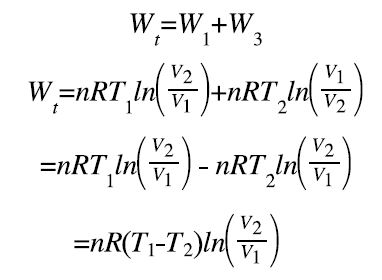 Slechts een deel van de totale effectieve energie Wt kan gebruikt worden als effectieve arbeid Wm door externe belasting op de motor. De resterende hoeveelheid vertegenwoordigd verlies in de Stirling motor zelf. De maximale thermische efficiëntie van een reversibel proces van een thermische motor is gelijk aan de verhouding tussen de totale hoeveelheid werk W1 en de hoeveelheid toegevoegde thermische energie: 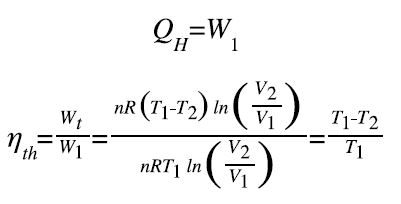 Volgens Carnot is dit de theoretische maximaal haalbare thermische efficiëntie van een thermische motor. De efficiency neemt af met toenemende temperatuurverschillen. |
28/05/2017